
What do we learn when making a robot?
The learning affordances of this robot are not in the toy itself but rather in the process of making it. This way, we experimented an authentic learning by making process that can be framed from a constructivist theoretical perspective in that it aims to build the understanding of the ideas embedded in the creation of personally meaningful artifacts (Papert, 1993). These learning experiences are based on the premise that constructing external physical artifacts can facilitate knowledge construction (Wilkerson-Jerde, Wagh & Wilensky, 2015).
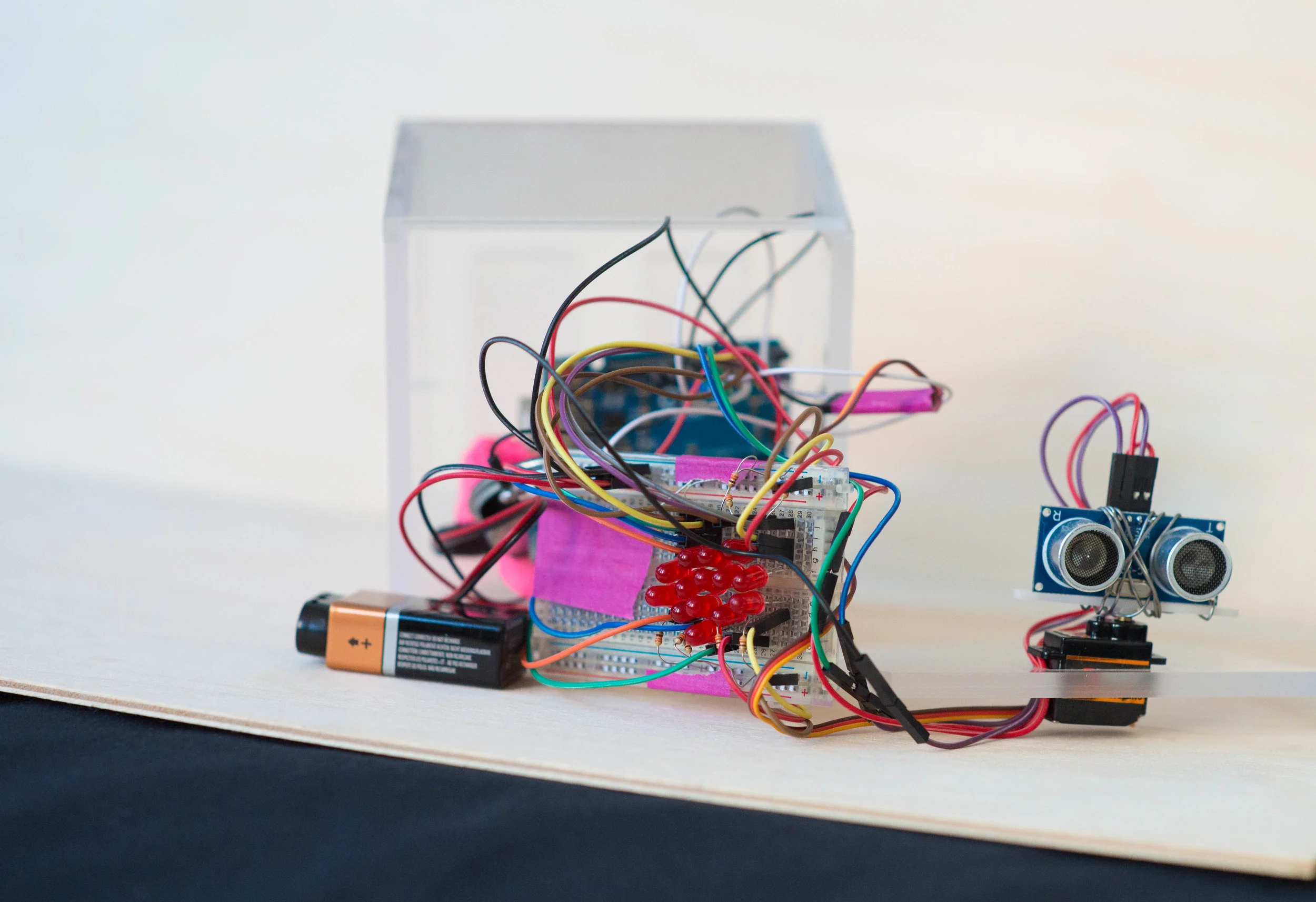
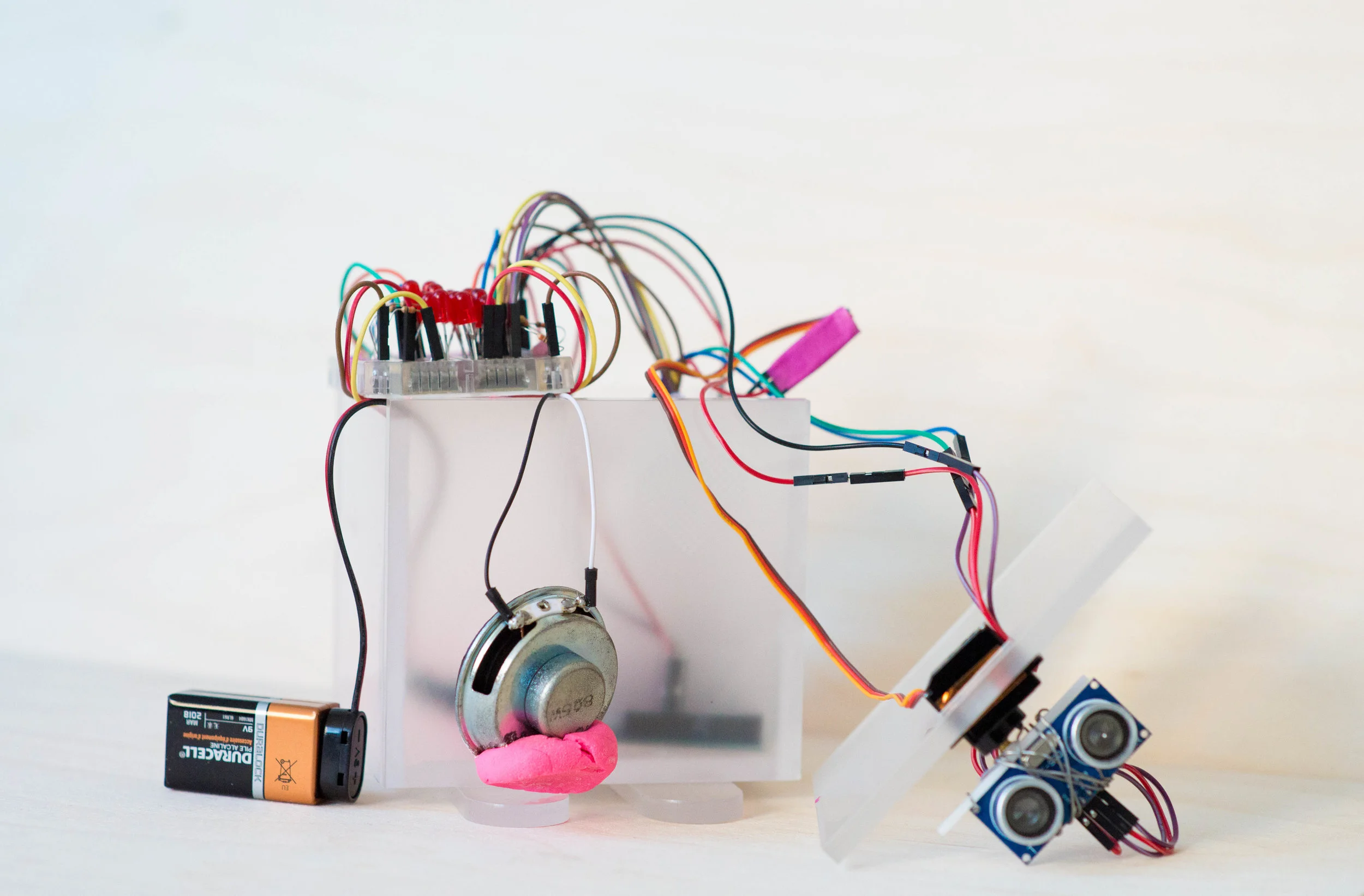
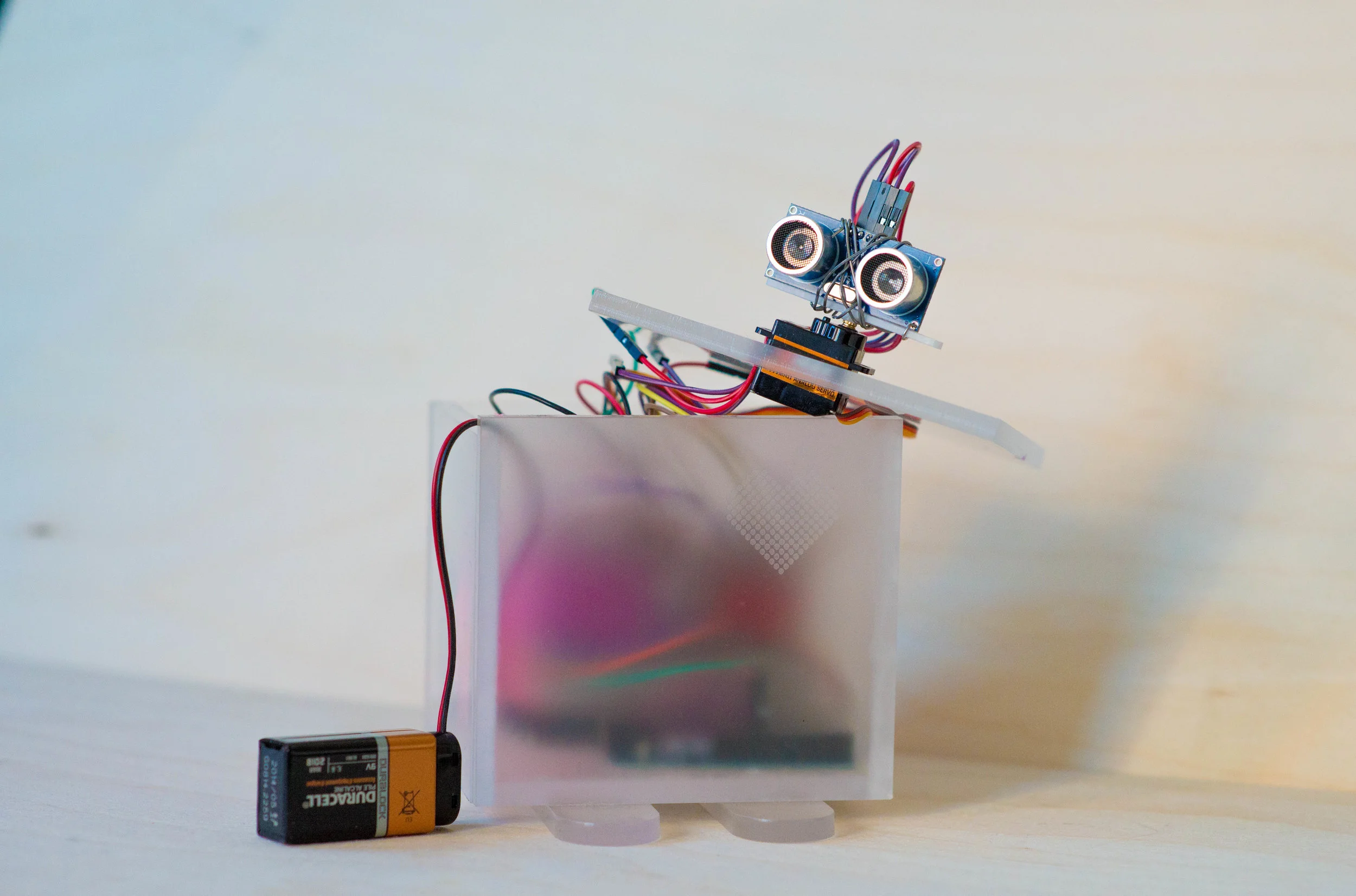
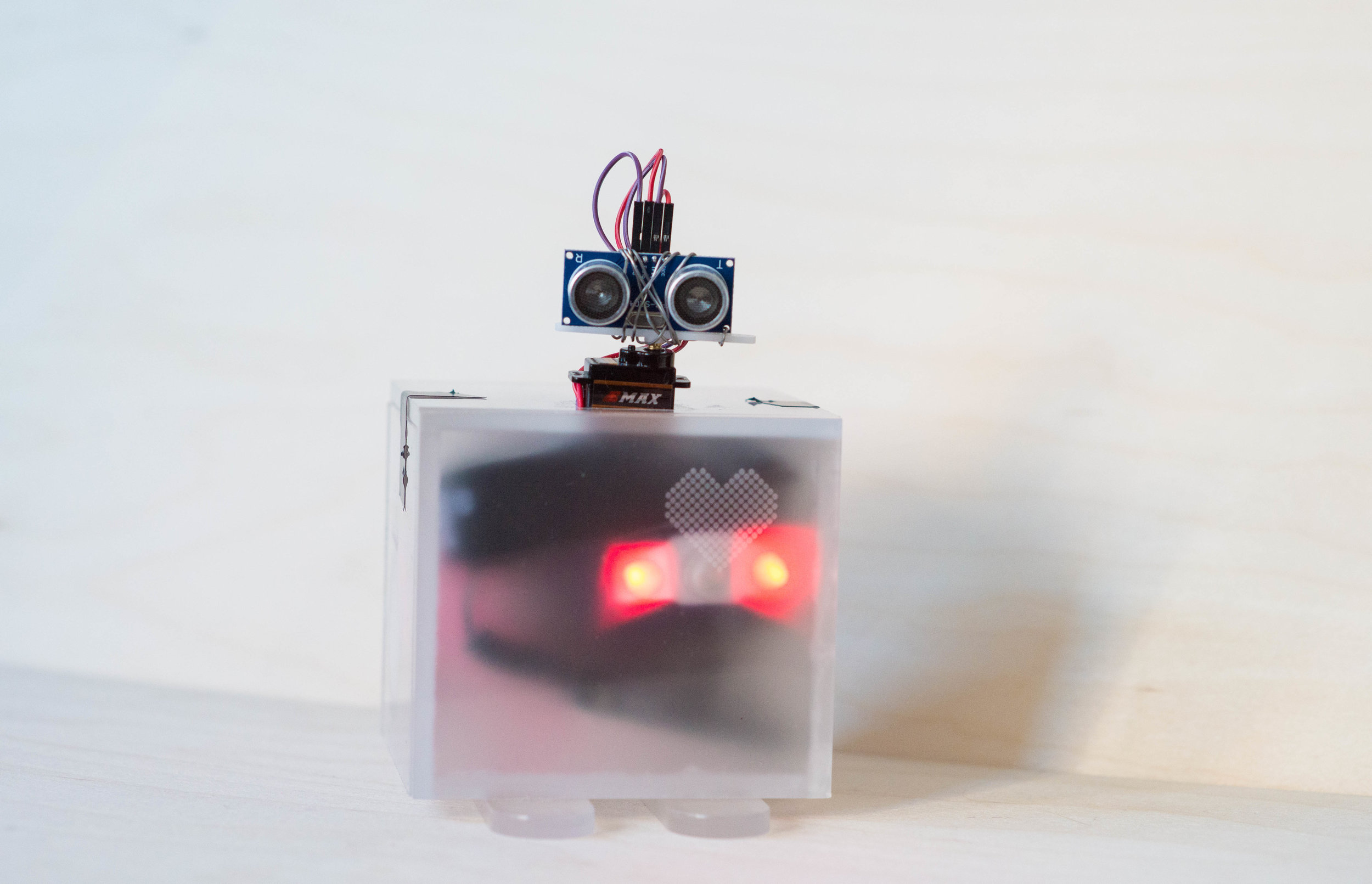
Husky is a friendly robot that gets excited when people is close to him by making sounds, moving his head, and lighting up his heart. He can detect how far is a person (or object) and emit different sounds that show with higher melodies how he gets excited the more closely the person is.
MA project developed with Adriana Selman for Tools and Toys class.

- Papert, S. (1993). The children's machine: rethinking school in the age of computer. New York: Basic Books.
- Wilkerson-Jerde, M., Wagh, A., & Wilensky, U. (2015). Balancing Curricular and Pedagogical Needs in Computational Construction Kits: Lessons From the DeltaTick Project. Science Education, 99 (3), 465–499. https://doi.org/10.1002/sce.21157